Rover
Rover#
Our rover is based on a tank chassis kit, controlled by a Pixhawk flight controller, and uses an NVIDIA Jetson Nano SBC to make autonomous steering decisions. The software logic for this is discussed in the chapter about ROS.
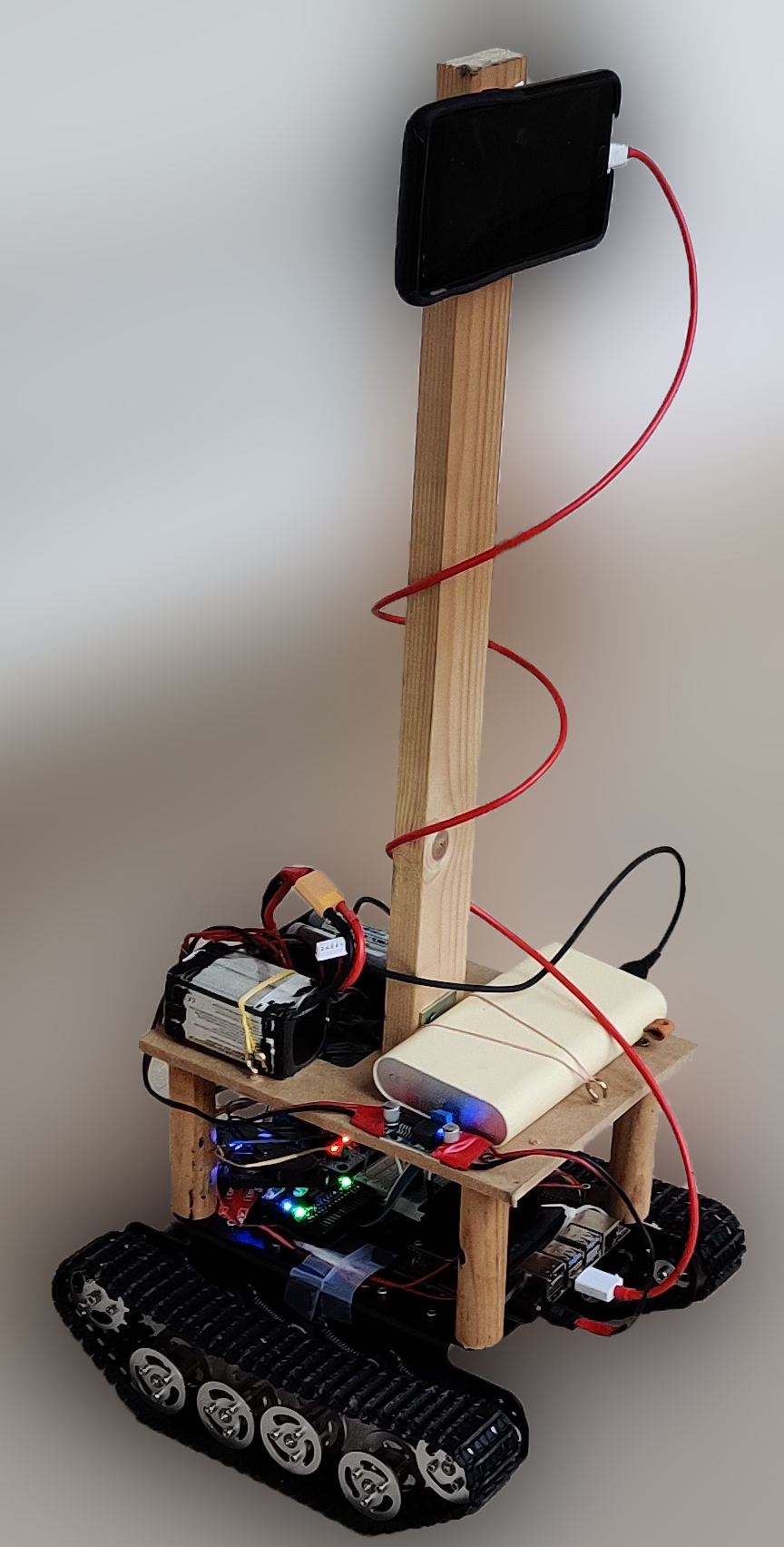
Fig. 8 The assembled rover.#
We used a generic USB Wi-Fi adapter to connect our ground station (laptop) to the SBC and by extent, the flight controller.
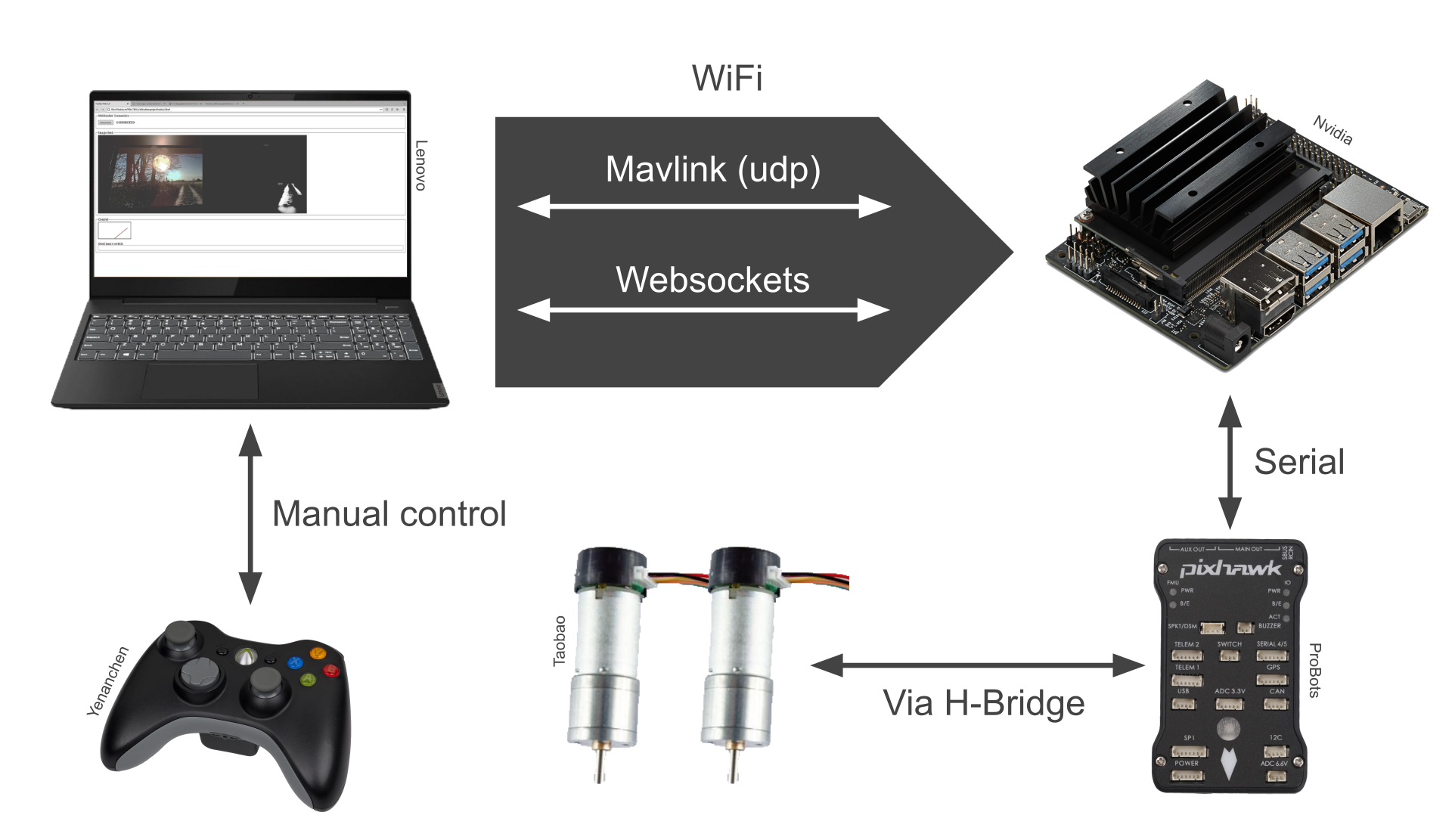
Fig. 9 Rover and gcs system overview#
The rover’s components are discussed in Components.
All configuration of the Pixhawk, as well as manual control of the rover was done through QGroundControl GCS software. See the QGroundControl chapter for more info about this.
See Ardupilot Configuration for all the necessary ardupilot parameter tweaks.