ROS
Contents
ROS#
ROS (Robot Operating System) is a “set of software libraries and tools that help you build robot applications”. We used the newest stable ROS release, which at the time of creating this project was ROS 2: Foxy Fitzroy.
A robot programmed using ROS uses Nodes as its functional blocks and Topics to exchange data between these nodes.
Nodes are separated into packages. A package is the minimal publishable unit of ROS ‘stuff’.
To control our rover we created one package: “pathy”. This package contains all nodes to handle camera input, steering, oversight etc.
We discuss the various nodes and their function in our package’s readme.
Two auxillary components are needed to use the package: DroidCam for the software side of the rover’s camera and web UI for the live monitoring system.
Advantages of using ROS#
Besides encouraging a modular approach, ROS also offers some nice debugging functionality.
Topic inspection#
To debug a ROS topic (“/pathy/steering” in this example), use:
ros2 topic echo /pathy/steering
Something similar can be used for Image topics:
ros2 run image_tools showimage --ros-args -r image:=/pathy/rgb
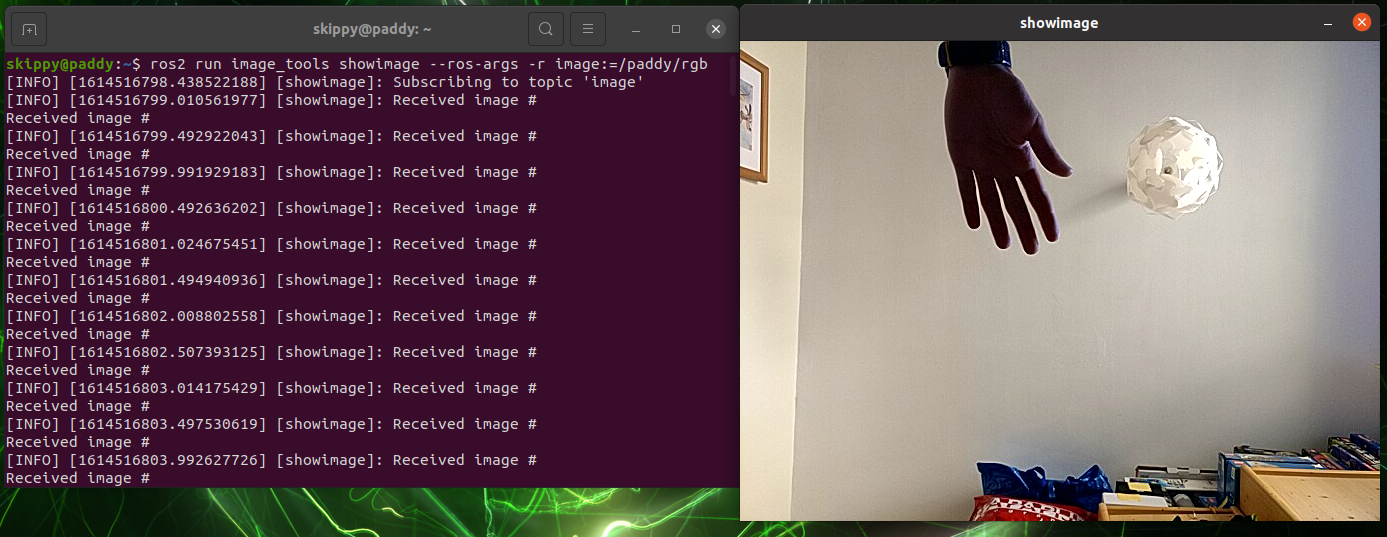
Fig. 15 Using showimage to inspect an image topic#
Rewriting topics#
Because topics are just strings, and nodes are thus loosely coupled, it is possible to rewrite topics.
I often used:
ros2 run pathy mav --ros-args -r /pathy/steering_safe:=/pathy/steering
…during development to run the rover with ‘unsafe’ steering (steering messages that aren’t protected by the dead man’s switch).