Autonomously Following Forest Paths with a Mobile Robot using Semantic Segmentation
Contents
Autonomously Following Forest Paths with a Mobile Robot using Semantic Segmentation#
Website: pathy.pfiers.net
This project is Pieter Fiers and Simon Germeau’s professional bachelor’s thesis for UCLL’s Aplied Informatics degree.
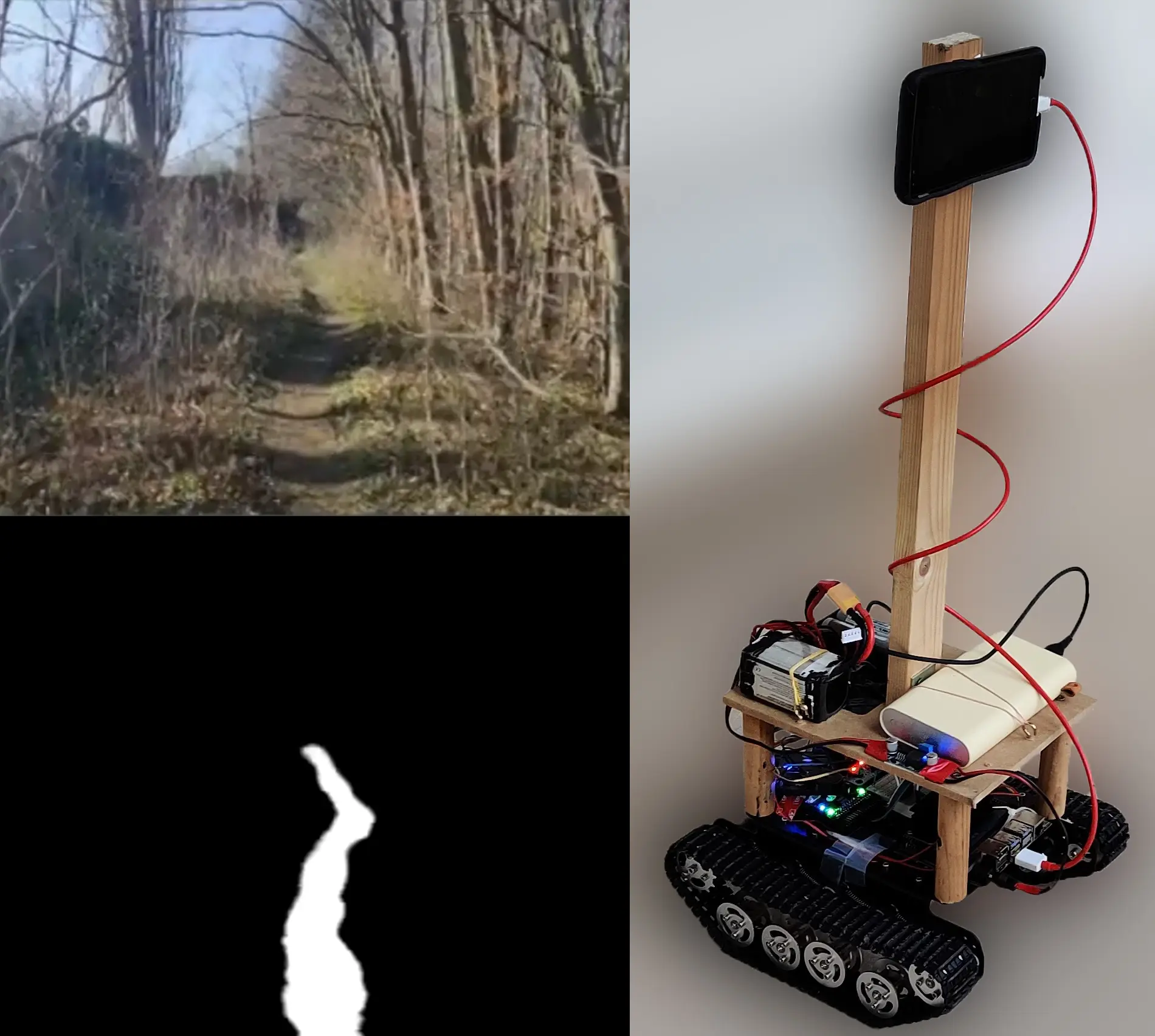
We created a rover that is capable of autonomously following forest paths.
We used a Semantic Segmentation CNN, as opposed to the classification CNN used by Giusti et al.1 and Smolyanskiy et al.2. We believe this enables interesting future expansions, like higher-level decision making about path intersections, and the mapping of road geometries.
Repository structure#
The repository is structured according to the four main stages of our project:
Dataprep - Documentation about, and the scripts we used for, the processing and labelling of data used for training.
Model - This folder contains the machine learning process we used to train our CNN.
Rover - Documentation regarding the hardware aspect of our rover.
ROS - All documentation, ROS (Robot Operating System) nodes, and extra files needed to make the rover drive itself.
Presentation#
Demo videos#
All demo videos combined (see YouTube description for timestamps):