Pathy
Contents
Pathy#
Pathy, the ROS package that runs padnet, consists of 7 nodes:

Fig. 16 Nodes in the Pathy package#
Nodes#
Running#
During development and testing we manually started all nodes using:
ros2 run pathy <name-of-node>
In Byobu, a terminal multiplexer, this looks something like this:
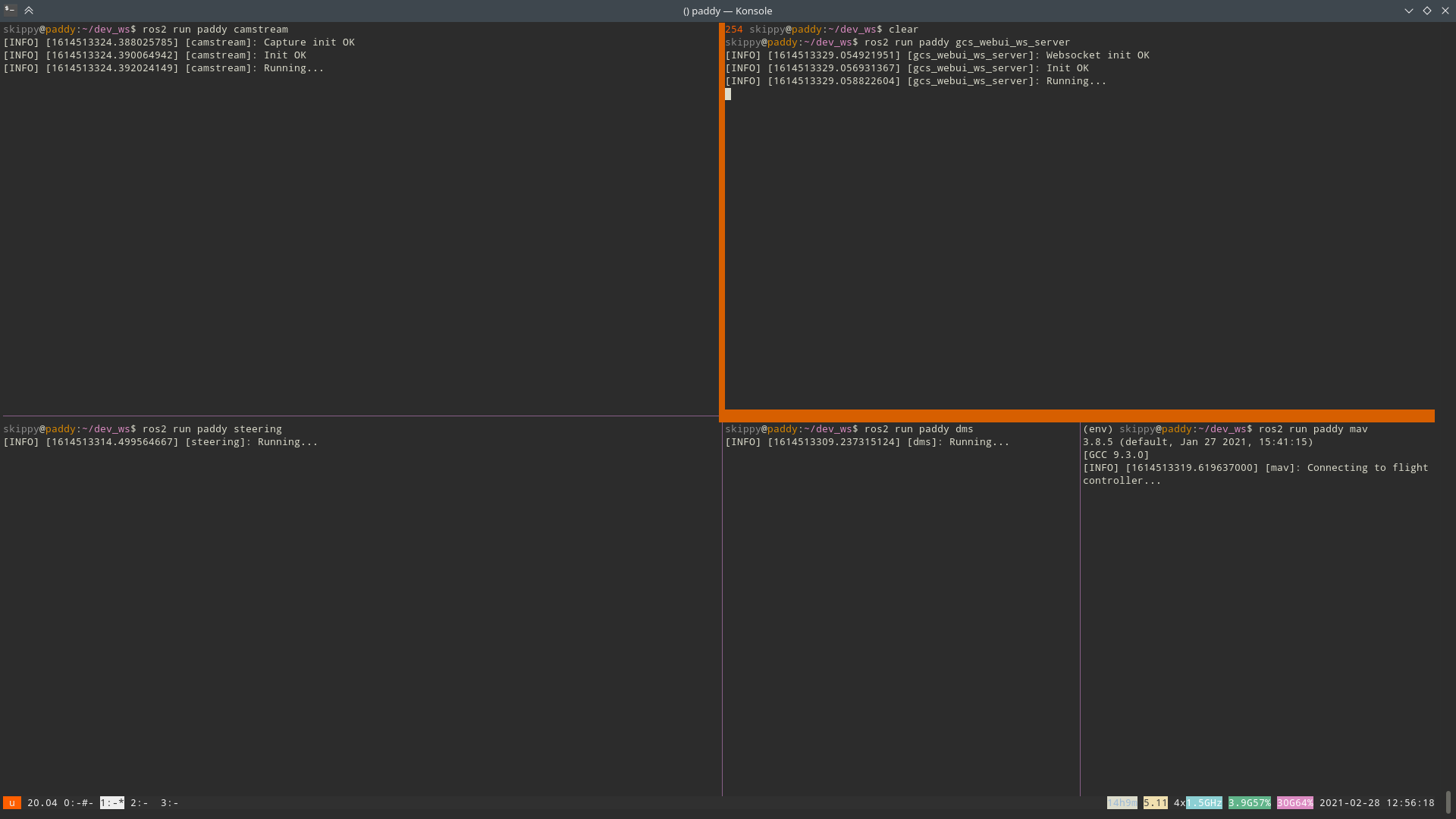
Fig. 17 Running pathy nodes in development#
This would probably be a bit of a hassle in production. ROS 2 of course has a more elegant way of launching nodes . This is a possible improvement.
Parameters#
Currently, all node arguments are hardcoded. This isn’t great. ROS 2 again has more elegant way of handling this (e.g. using parameter files ). This is a possible improvement.